Yamaha hat kürzlich einen Patentantrag für ein Trike eingereicht, das scheinbar eine Weiterentwicklung des Niken GT ist… und das möglicherweise in der Lage ist, sich selbstständig zu neigen.
Motociclismo hat die neu eingereichten Dokumente überprüft, die sich auf ein ‘neigendes Fahrzeug’ beziehen – mit zwei Rädern vorne und einem hinten.
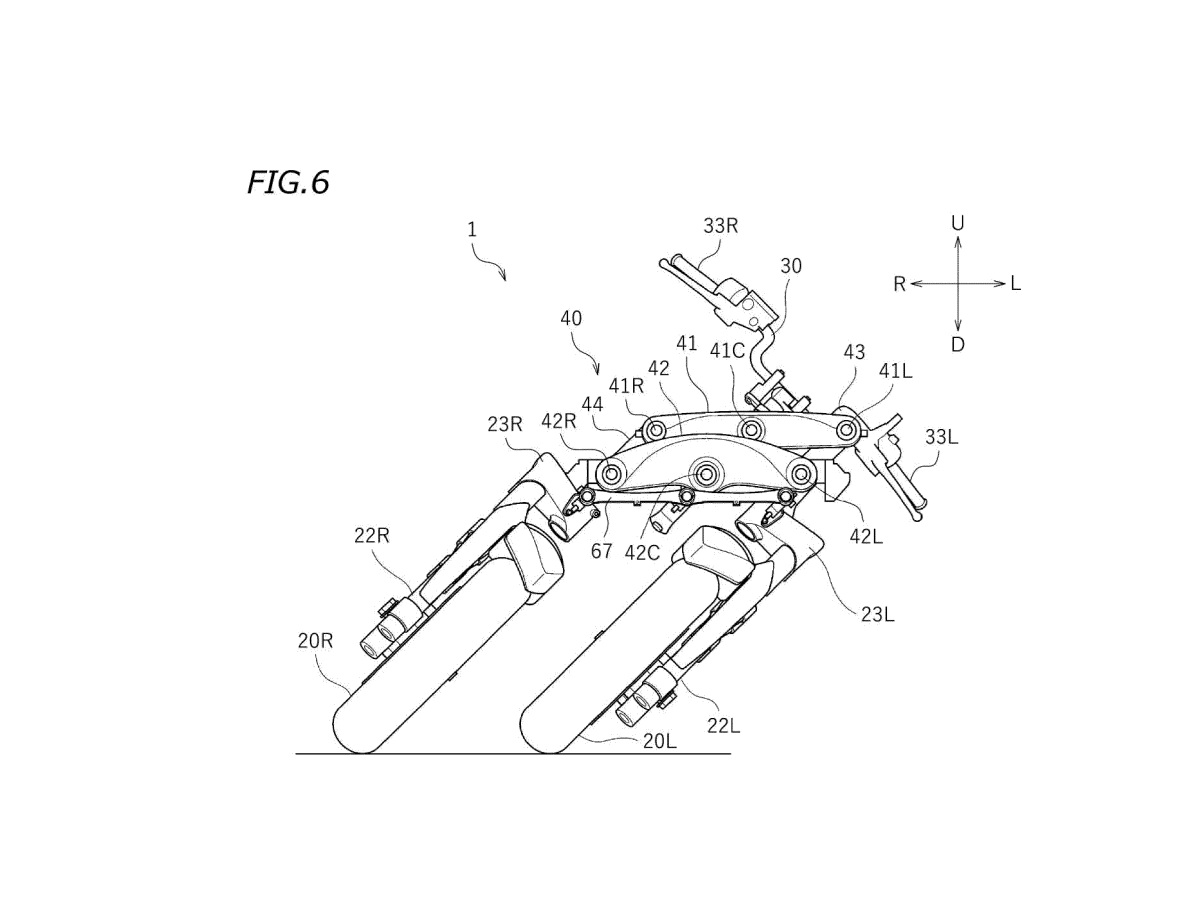
Es verfügt über unabhängige Motoren für jedes der Vorderräder, die eine Rolle beim Neigen des Trikes spielen könnten und entweder vom Fahrer oder automatisch basierend auf Sensordaten aktiviert werden können.
Laut der Beschreibung ist ‘es schwierig, ein neigendes Fahrzeug so zu gestalten, dass die Haltekraft unabhängig von Geschwindigkeit und Kurvenradius immer konstant ist’ – während mehrere Fahrer die Bedeutung der konstanten Lenkunterstützung betonen.
Andererseits gibt es auch Fahrer, die eine variable Unterstützungsstärke bevorzugen, und es ist nicht möglich, ein neigendes Fahrzeug zu entwerfen, das diese Kraft entweder konstant oder variabel je nach individueller Vorliebe des Fahrers aufrechterhält.
Hier zielt das Patent darauf ab, eine Lösung anzubieten: ‘Wenn die Antriebskräfte des linken Vorderrads und des rechten Vorderrads unabhängig voneinander gesteuert werden können, ist es möglich, eine Steuerung durchzuführen, die die Haltekraft je nach Vorliebe des Fahrers variiert’. Somit zielt der japanische Vorschlag darauf ab, ‘ein kippendes Fahrzeug und ein Verfahren zur Steuerung eines kippenden Fahrzeugs bereitzustellen, bei dem ein links angeordnetes Vorderrad relativ zum Steuerrohr und ein rechts angeordnetes Vorderrad relativ zum Steuerrohr in Bezug auf die Fahrzeugrichtung links-rechts angeordnet sind, wobei die Antriebskräfte des linken Vorderrads und des rechten Vorderrads unabhängig voneinander gesteuert werden können’.
Zu den Sensoren kann das System einen Neigungswinkel-Detektor für den Rahmen, einen Geschwindigkeitsensor und eine Steuereinheit umfassen, die mit beiden verbunden ist, um den Motor an jedem Rad basierend auf dem Neigungswinkel und der Fahrzeuggeschwindigkeit zu steuern. Es könnte auch einen Sensor geben, der Objekte vor dem Fahrzeug erkennt – wie ein Fahrzeug vorne oder eine markierte Fahrbahn auf der Straße. Der Fahrer könnte auf die Anwesenheit solcher Objekte hingewiesen werden, wenn das kippende Fahrzeug mit relativ hohen Geschwindigkeiten fährt.






{kind=link}