Yamaha ha presentado recientemente una solicitud de patente para un trike que parece ser una evolución del Niken GT… y que podría ser capaz de inclinarse por sí mismo.
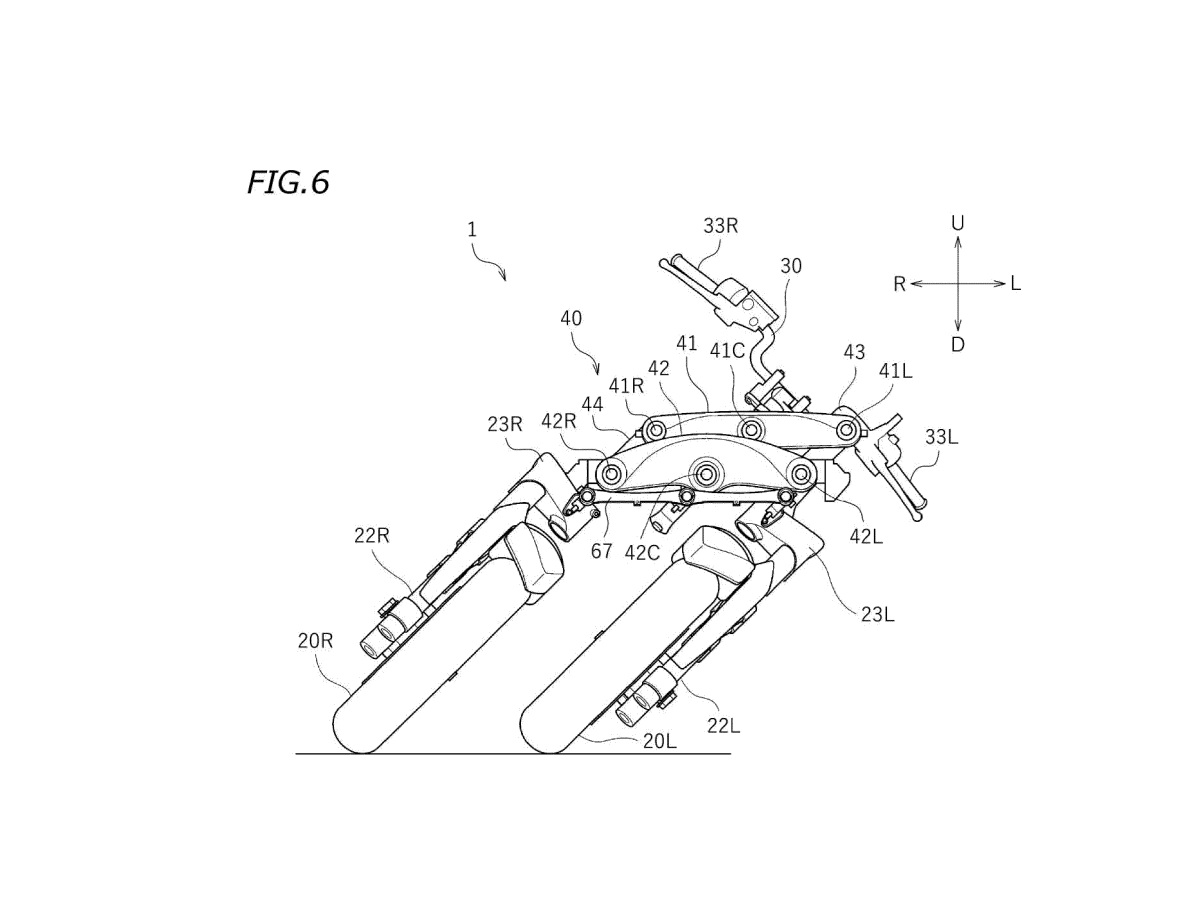
Motociclismo revisó los documentos recién presentados, que se refieren a un ‘vehículo inclinado’ – con dos ruedas en la parte delantera y una en la trasera.
Cuenta con motores independientes para cada una de las ruedas delanteras, que podrían desempeñar un papel en la inclinación del trike y pueden ser activados ya sea por el conductor o automáticamente en función de los datos de los sensores.
Según la descripción, ‘es difícil diseñar un vehículo inclinado de manera que la fuerza de sujeción sea siempre constante, independientemente de la velocidad y el radio de giro’ – mientras que varios conductores mencionan la importancia de que la fuerza de apoyo en la dirección se mantenga constante.
Por otro lado, también hay conductores que prefieren una fuerza de apoyo variable, y no es posible diseñar un vehículo que se incline y mantenga esa fuerza ya sea constante o variable dependiendo de la preferencia individual del conductor.
Este es el lugar donde la patente busca ofrecer una solución: ‘Si las fuerzas de tracción de la rueda delantera izquierda y la rueda delantera derecha pueden ser controladas de manera independiente entre sí, es posible realizar un control como variar la fuerza de sujeción dependiendo de la preferencia del piloto’. Así, la propuesta japonesa tiene como objetivo ‘proporcionar un vehículo de inclinación y un método para controlar un vehículo de inclinación que tenga una rueda delantera izquierda dispuesta hacia la izquierda en relación con el tubo de dirección y una rueda delantera derecha dispuesta hacia la derecha en relación con el tubo de dirección con respecto a una dirección izquierda-derecha del vehículo en la que las fuerzas de tracción de la rueda delantera izquierda y la rueda delantera derecha pueden ser controladas de manera independiente entre sí’.
Entre los sensores, el sistema puede incluir un detector de ángulo de inclinación para el chasis, un sensor de velocidad y una unidad de control vinculada a ambos para gestionar el motor en cada rueda en función del ángulo de inclinación y la velocidad del vehículo. También podría haber un sensor que detecte objetos delante, como un vehículo frente o un carril de conducción marcado en la carretera. El piloto puede ser alertado sobre la presencia de tales objetos cuando el vehículo de inclinación está viajando a velocidades relativamente altas.









{kind=link}